Tensors
- a tensor is an object that is invariant under a change of coordinate/basis and has COMPONENTS that change in a special predictable way under a change of coordinates/basis
- a tensor is a collection of vectors and covectors combined together using the tensor product
- tensors can take several different forms (e.g. scalars,vectors, covectors, linear maps, bilinear maps, multilinear maps, etc)
Tensors - Introduction
Click here to expand...
1 - How do basis vector components change WRT change of basis?
Click here to expand...
Link to originalWe define:
- old basis: {𝑒1, 𝑒2}
- new basis: {𝑒̃1, 𝑒̃2}
We define:
- forward transform: old basis → new basis
- 𝑒̃1 = 𝑎·𝑒1+ 𝑏·𝑒2
- 𝑒̃2 = 𝑐·𝑒1+ 𝑑·𝑒2
- backward transform: new basis → old basis
- 𝑒1 = 𝑎·𝑒̃1+ 𝑏·𝑒̃2
- 𝑒2 = 𝑐·𝑒̃1+ 𝑑·𝑒̃2
Forward transform is the inverse of Backward transform
Thus
Confirming the inverse behavior of the above equations
Thus 𝛿𝑖𝑗 is the kronecker delta function:
2 - How do vector components change WRT change of basis?
Click here to expand...
Link to original
- 𝑣 = 𝑣[1] · 𝑒1 + 𝑣[2] · 𝑒2
- 𝑣̃ = 𝑣̃[1] · 𝑒̃1 + 𝑣̃[2] · 𝑒̃2
- 𝑣 = 𝑣̃ are geometrically the same vector
Thus
Thus
Thus
- 𝐵 is used to transform vector components from old to new
- 𝐹 is used to transform vector components from new to old
3 - Covector Introduction
Click here to expand...
Link to originalCovectors are functions 𝛼: 𝑉→ℝ that map a vector to a number and also obey the following rules:
- 𝛼(𝑣 + 𝑢) = 𝛼(𝑣) + 𝛼(𝑢)
- 𝛼(𝑛·𝑣) = 𝑛·𝛼(𝑣)
Covectors can also be viewed as elements of dual vector space 𝑉*:
- (𝑛·𝛼)(𝑣) = 𝑛·𝛼(𝑣)
- (𝛼+𝛽)(𝑣) = 𝛼(𝑣) + 𝛽(𝑣)
Covectors can be visualized as level sets
What does a covector measure when we write [2 1]? like 2 of what and 1 of what?
Covectors don’t live in the vector space 𝑉, thus we can’t use basis vectors in 𝑉 like {𝑒1, 𝑒2} to measure covectors
epsilon covectors 𝜀𝑖 are defined as:
- 𝜀1(𝑒1) = 1
- 𝜀1(𝑒2) = 0
- 𝜀2(𝑒1) = 0
- 𝜀2(𝑒2) = 1
Thus:
- 𝜀𝑖(𝑒𝑗) = 𝛿𝑖𝑗 # the Kronecker delta function
In other words, let:
- 𝐸 = [𝑒1|𝑒2] a matrix whose columns are the basis vectors {𝑒1, 𝑒2}
- 𝐸ˆ = [𝜀1|𝜀2] a matrix whose columns are the epsilon covectors {𝜀1, 𝜀2}
The system of equations can be expressed as:
epsilon covector 𝜀𝑖 consumes arbitrary vector 𝑣:
- 𝜀1(𝑣) = 𝜀1(𝑣[1]·𝑒1 + 𝑣[2]·𝑒2)
- 𝜀1(𝑣) = 𝑣[1] · 𝜀1(𝑒1) + 𝑣[2] · 𝜀1(𝑒2)
- 𝜀1(𝑣) = 𝑣[1]
- 𝜀2(𝑣) = 𝜀2(𝑣[1]·𝑒1 + 𝑣[2]·𝑒2)
- 𝜀2(𝑣) = 𝑣[1] · 𝜀2(𝑒1) + 𝑣[2] · 𝜀2(𝑒2)
- 𝜀2(𝑣) = 𝑣[2]
arbitrary covector 𝛼 consumes arbitrary vector 𝑣:
- 𝛼(𝑣) = 𝛼(𝑣[1]·𝑒1 + 𝑣[2]·𝑒2)
- 𝛼(𝑣) = 𝑣[1]·𝛼(𝑒1) + 𝑣[2]·𝛼(𝑒2)
- 𝛼(𝑣) = 𝜀1(𝑣)·𝛼(𝑒1) + 𝜀2(𝑣)·𝛼(𝑒2)
- 𝛼(𝑣) = 𝜀1(𝑣)·𝛼1 + 𝜀2(𝑣)·𝛼2
- 𝛼(𝑣) = 𝛼1·𝜀1(𝑣) + 𝛼2·𝜀2(𝑣)
- 𝛼(𝑣) = (𝛼1·𝜀1 + 𝛼2·𝜀2) (𝑣)
Thus
- 𝛼 = 𝛼1·𝜀1 + 𝛼2·𝜀2
Thus
- any arbitrary covector 𝛼 can be expressed as a linear combination of basis epsilon covectors {𝜀1, 𝜀2}
The epsilon covectors 𝜀1 and 𝜀2 form the basis vectors of the dual vector space 𝑉*:
- 𝜀1 and 𝜀2 are linearly independent
1.proof 1, 𝜀2} from the dual vector space 𝑉* is linearly independent if:
- scalars {𝑎1, 𝑎2} must be ALL zero such that:
- 𝑎1𝜀1 + 𝑎2𝜀2 = 𝜀0 # where 𝜀0is the null functional (i.e. zero vector in 𝑉*)
We need to prove the above statement.
The expression 𝑎1𝜀1 + 𝑎2𝜀2 = 𝜀0 naturally leads to (𝑎1𝜀1 + 𝑎2𝜀2)(𝑣) = 𝜀0(𝑣); for all 𝑣∊𝑉. Where we have both sides “consume” an arbitrary vector 𝑣∊𝑉:
- (𝑎1𝜀1 + 𝑎2𝜀2)(𝑣) = 𝜀0(𝑣); for all 𝑣∊𝑉
- (𝑎1𝜀1 + 𝑎2𝜀2)(𝑣) = 0; for all 𝑣∊𝑉 # by assumption that 𝜀0(𝑣) = 0 for all 𝑣∊𝑉
- 𝑎1𝜀1(𝑣) + 𝑎2𝜀2(𝑣) = 0; for all 𝑣∊𝑉 # because they are linear transformations
Thus the original statement that we need to prove now becomes:
- scalars {𝑎1, 𝑎2} must be ALL zero such that:
- 𝑎1𝜀1(𝑣) + 𝑎2𝜀2(𝑣) = 0; for all 𝑣∊𝑉
Since the new statement is true for every vector 𝑣∊𝑉, it must also be true for the basis vectors {𝑒1, 𝑒2}:
- that the scalars {𝑎1, 𝑎2} must be ALL zero such that:
- 𝑎1𝜀1(𝑒𝑖) + 𝑎2𝜀2(𝑒𝑖) = 0; for all 𝑒𝑖∊{𝑒1, 𝑒2}
Evaluating the above statement for each basis vector yields:
- that the scalars {𝑎1, 𝑎2} must be ALL zero such that:
- for 𝑒𝑖=𝑒1:
- 𝑎1𝜀1(𝑒1) + 𝑎2𝜀2(𝑒1) = 0
- 𝑎1*1 + 𝑎2*0 = 0
- 𝑎1 = 0
- for 𝑒𝑖=𝑒1:
- 𝑎1𝜀1(𝑒2) + 𝑎2𝜀2(𝑒2) = 0
- 𝑎1*0 + 𝑎2*1 = 0
- 𝑎2 = 0
Thus, 𝑎1 and 𝑎2 must equal to 0.
A set of covectors {𝜀
- every arbitrary covector 𝛼∊𝑉* can be expressed as a linear combination of {𝜀1, 𝜀2}
- see above
The components of covector 𝛼 can be extracted as follows:
- 𝛼 = 𝛼1·𝜀1 + 𝛼2·𝜀2
- 𝛼(𝑒1) = 𝛼1
- 𝛼(𝑒2) = 𝛼2
Thus:
- the components of an arbitrary covector (e.g. [2 1]) are measured by the number of covector/level-set lines that the basis vectors {𝑒1, 𝑒2} pierces
RECAP:
- starting with basis vectors 𝑒𝑖 of a vector space 𝑉
- you can derive the epsilon covectors 𝜀𝑖 as so: 𝜀𝑖(𝑒𝑗) = 𝛿𝑖𝑗
- in which the epsilon covectors form a dual basis of the dual vector space 𝑉*
4 - How do covector components change WRT change of basis?
Click here to expand...
Link to originalLet’s define:
𝜀1(𝑒1) = 1 = 𝜀̃1(𝑒̃1)
𝜀1(𝑒2) = 0 = 𝜀̃1(𝑒̃2)
𝜀2(𝑒1) = 0 = 𝜀̃2(𝑒̃1)
𝜀2(𝑒2) = 1 = 𝜀̃2(𝑒̃2)𝜀𝑖(𝑒𝑗) = 𝛿𝑖𝑗 = 𝜀̃𝑖(𝑒̃𝑗)
Thus
- 𝛼 = 𝛼̃ = 𝛼1·𝜀1 + 𝛼2·𝜀2
- 𝛼 = 𝛼̃ = 𝛼̃1·𝜀̃1 + 𝛼̃2·𝜀̃2
- 𝛼(𝑒1) = 𝛼1
- 𝛼(𝑒2) = 𝛼2
- 𝛼(𝑒̃1) = 𝛼̃1
- 𝛼(𝑒̃2) = 𝛼̃2
Thus
- 𝛼 = 𝛼1·𝜀1 + 𝛼2·𝜀2
- 𝛼 = 𝛼(𝑒1)·𝜀1 + 𝛼(𝑒2)·𝜀2
- 𝛼 = 𝛼̃1·𝜀̃1 + 𝛼̃2·𝜀̃2
- 𝛼 = 𝛼(𝑒̃1)·𝜀̃1 + 𝛼(𝑒̃2)·𝜀̃2
Thus
5 - How do dual basis covectors change WRT change of basis?
Click here to expand...
Link to originalWe define:
- 𝜀𝑖(𝑒𝑗) = 𝛿𝑖𝑗 = 𝜀̃𝑖(𝑒̃𝑗)
By definition of basis
6 - Linear Maps Introduction
Click here to expand...
Link to original
A linear map 𝐿:
- maps vectors to vectors, 𝐿: 𝑉→𝑊 (e.g. 𝐿: 𝑉→𝑉)
- add inputs or the outputs, 𝐿(𝑣+𝑤) = 𝐿(𝑣) + 𝐿(𝑤)
- scale the inputs or outputs, 𝐿(𝓃·𝑣) = 𝓃·𝐿(𝑣)
The Matrix Multiplication can be purely Derived from the Linearity Rules Above
- 𝑤 = 𝐿(𝑣) = 𝐿(𝑣1𝑒1 + 𝑣2𝑒2)
- 𝑤 = 𝐿(𝑣) = 𝑣1𝐿(𝑒1) + 𝑣2𝐿(𝑒2)
- 𝐿(𝑒1) = 𝐿11𝑒1 + 𝐿21𝑒2
- 𝐿(𝑒2) = 𝐿12𝑒1 + 𝐿22𝑒2
- 𝑤 = 𝐿(𝑣) = 𝑣1(𝐿11𝑒1 + 𝐿21𝑒2) + 𝑣2(𝐿12𝑒1 + 𝐿22𝑒2)
- 𝑤 = 𝐿(𝑣) = 𝑣1𝐿11𝑒1 + 𝑣1𝐿21𝑒2 + 𝑣2𝐿12𝑒1 + 𝑣2𝐿22𝑒2
- 𝑤 = 𝐿(𝑣) = (𝐿11𝑣1+ 𝐿12𝑣2)𝑒1 + (𝐿21𝑣1+ 𝐿22𝑣2)𝑒2
- 𝑤 = 𝐿(𝑣) = ( 𝑤1)𝑒1 + ( 𝑤2)𝑒2
Thus:
- 𝑤1 = 𝐿11𝑣1+ 𝐿12𝑣2
- 𝑤2 = 𝐿21𝑣1+ 𝐿22𝑣2
Thus:
Basis of Linear Maps
{𝑒1𝜀1, 𝑒1𝜀2, 𝑒2𝜀1, 𝑒2𝜀2} is one possible basis for linear map 𝐿: ℝ2→ℝ2 where:
Thus
- 𝐿 = 𝐿𝑖𝑗 𝑒𝑖𝜀𝑗 # Einstein’s notation
Thus: linear maps can be written as linear combinations of vector-covector pairs
How is a Basis 𝑒𝑖𝜀𝑗 a Linear Map (That Eats a Vector and Outputs a Vector)?
Given:
- 𝐿 = 𝐿𝑖𝑗 𝑒𝑖𝜀𝑗
- 𝑣 = 𝑣𝑘𝑒𝑘
Let 𝐿 eat a vector 𝑣:
- 𝐿(𝑣) = 𝐿(𝑣)
- 𝐿(𝑣) = 𝐿𝑖𝑗𝑒𝑖𝜀𝑗(𝑣𝑘𝑒𝑘)
- 𝐿(𝑣) = 𝐿𝑖𝑗𝑣𝑘𝑒𝑖𝜀𝑗(𝑒𝑘)
- 𝐿(𝑣) = 𝐿𝑖𝑗𝑣𝑘𝑒𝑖𝛿𝑗𝑘
- 𝐿(𝑣) = 𝐿𝑖𝑗𝑣𝑗𝑒𝑖
- 𝐿(𝑣) = 𝑤𝑖𝑒𝑖 # 𝐿𝑖𝑗𝑣𝑗is a scalar, thus replace with 𝑤𝑖= 𝐿𝑖𝑗𝑣𝑗
- 𝐿(𝑣) = 𝑤 # which outputs a vector
Given a linear transformation 𝐿, the set of vectors for which 𝐿 vanishes is called the KERNEL of 𝐿
- kernel(𝐿) = {𝑥∊𝑋 : 𝐿𝑥 = 0 in 𝑌}
- range (𝐿) = {𝑦∊𝑌 : ∃𝑥∊𝑋 such that 𝑇𝑥 = 𝑦}
Given a linear transformation 𝐿:
- kernel of 𝐿 is a linear subspace of 𝑋
- range of 𝐿 is a linear subspace of 𝑌
The dimension of range(𝐿) is called the rank of 𝐿 (i.e. rank(𝑇))
Matrices: Null-Spaces, Column-Spaces, Row Spaces
- null-space of 𝐴 is the kernel of 𝐴
- the kernel space is orthogonal to the row vectors/space
- column space of 𝐴 is the range of 𝐴
- is the subspace of ℝ𝑚 spanned by column vectors
- row space of 𝐴
- is the subspace of ℝ𝑛 spanned by row vectors
The Rank-Nullity Theorem
Given a linear transformation 𝐿 from ℝ𝑛 to ℝ𝑚, then:
- dim ker(𝐿) + dim range(𝐿) = 𝑛
7 - How do linear transformations change WRT change of basis?
Click here to expand...
Link to originalDetailed
Einstein’s notation:
Thus
Simple (using vector-covector pairs)
Given:
Linear Map Definition
Basis Vectors
Basis Covectors
- 𝐿 = 𝐿˜𝑖𝑗 𝑒̃𝑖𝜀̃𝑗
- 𝐿 = 𝐿𝑖𝑗 𝑒𝑖𝜀𝑗
Then
Then start with the definition of linear map 𝐿:
- 𝐿 = 𝐿𝑖𝑗 𝑒𝑖𝜀𝑗
Next, transform all the basis vectors and basis covectors individually
- 𝐿 = 𝐿𝑖𝑗 𝐵𝑘𝑖𝑒̃𝑘𝐹𝑗𝑙𝜀̃𝑙
- 𝐿 = (𝐵𝑘𝑖𝐿𝑖𝑗𝐹𝑗𝑙)𝑒̃𝑘𝜀̃𝑙
- 𝐿 = ( 𝐿˜𝑘𝑙)𝑒̃𝑘𝜀̃𝑙
Thus:
- 𝐿𝑘𝑙 = 𝐹𝑘𝑖𝐿˜𝑖𝑗𝐵𝑗𝑙
- 𝐿˜ = 𝐵𝐿𝐹
Then start with the definition of linear map 𝐿:
- 𝐿 = 𝐿˜𝑖𝑗 𝑒̃𝑖𝜀̃𝑗
Next, transform all the basis vectors and basis covectors individually
- 𝐿 = 𝐿˜𝑖𝑗 𝐹𝑘𝑖𝑒𝑘𝐵𝑗𝑙𝜀𝑙
- 𝐿 = (𝐹𝑘𝑖𝐿˜𝑖𝑗𝐵𝑗𝑙)𝑒𝑘𝜀𝑙
- 𝐿 = ( 𝐿𝑘𝑙)𝑒𝑘𝜀𝑙
Thus:
- 𝐿𝑘𝑙 = 𝐹𝑘𝑖𝐿˜𝑖𝑗𝐵𝑗𝑙
- 𝐿 = 𝐹𝐿˜𝐵
Another Way
Given:
- basis 𝑒 = {𝑒1, …, 𝑒𝑛}
- basis 𝑓 = {𝑓1, …, 𝑓𝑛}
- matrix 𝐹 = [𝑓] = [𝑓1 … 𝑓𝑛] where 𝑓𝑖 are columns expressed in 𝑒
Then:
- 𝑣𝑒 = 𝐹 𝑣𝑓
- 𝑣𝑓 = 𝐹-1 𝑣𝑒
Hence if:
- 𝑇∊𝐿(ℝ𝑛) and matrix 𝐴𝑒 is a realization of transformation 𝑇 expressed in basis 𝑒
What is the realization matrix 𝐴𝑓expressed in basis 𝑓?
- by definition:
- 𝑦𝑓 = 𝐴𝑓𝑥𝑓
- 𝑦𝑒 = 𝐴𝑒𝑥𝑒
- then:
- 𝑦𝑓 = 𝐹-1𝑦𝑒
- 𝑦𝑓 = 𝐹-1𝐴𝑒𝑥𝑒
- 𝑦𝑓 = 𝐹-1𝐴𝑒𝐹𝑥𝑓
- 𝐴𝑓𝑥𝑓 = 𝐹-1𝐴𝑒𝐹𝑥𝑓
- thus:
- 𝐴𝑓 = 𝐹-1𝐴𝑒𝐹
8 - How do basis of a linear transformation change WRT change of basis?
Click here to expand...
Link to originalTODO
9 - Metric Tensor Introduction
Click here to expand...
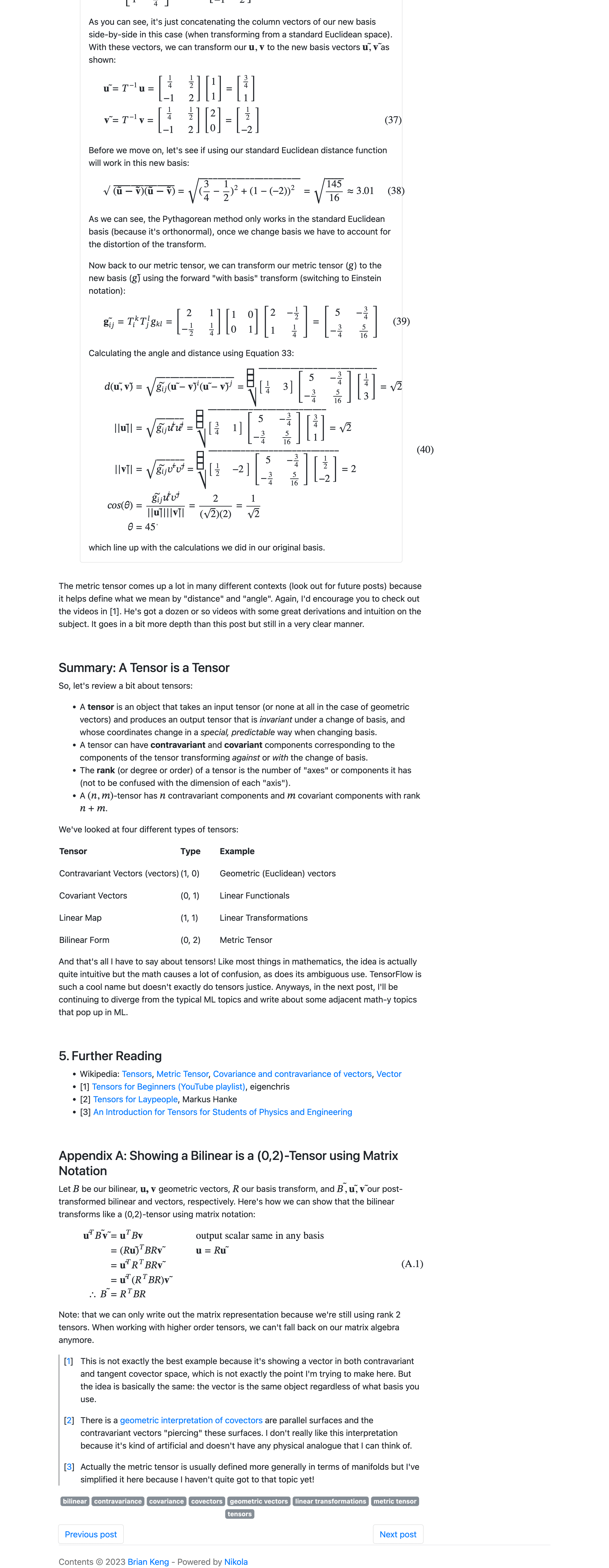
Link to originalMetric Tensors
- are invariant to change of basis
- measures: length & angle
Length
Click here to expand...
- ||𝑣||2 = 𝑣·𝑣
- ||𝑣||2 = (𝑣1𝑒1+ 𝑣2𝑒2)·(𝑣1𝑒1+ 𝑣2𝑒2)
- ||𝑣||2 = (𝑣1·𝑣1)(𝑒1·𝑒1) + 2(𝑣1·𝑣2)(𝑒2·𝑒2) + (𝑣2·𝑣2)(𝑒2·𝑒2)
- ||𝑣||2 = 𝑣𝑖𝑣𝑗(𝑒𝑖·𝑒𝑗) = 𝑣𝑖𝑣𝑗𝑔𝑖𝑗
- (𝑒𝑖·𝑒𝑗) = 𝑔𝑖𝑗
- ||𝑣||2 = 𝑣̃𝑖𝑣̃𝑗(𝑒̃𝑖·𝑒̃𝑗) = 𝑣̃𝑖𝑣̃𝑗𝑔̃𝑖𝑗
- (𝑒̃𝑖·𝑒̃𝑗) = 𝑔̃𝑖𝑗
Angles
Click here to expand...
Say we have Unit Vectors
- 𝑒̃1 = 𝑒1
- 𝑒̃2 = 𝑐𝑜𝑠(𝜃)·𝑒1 + 𝑠𝑖𝑛(𝜃)·𝑒2
three possible combinations:
- 𝑒̃1·𝑒̃1 = 𝑒1·𝑒1= 1
- 𝑒̃1·𝑒̃2 = 𝑒1· (𝑐𝑜𝑠(𝜃)·𝑒1 + 𝑠𝑖𝑛(𝜃)·𝑒2)
- = 𝑐𝑜𝑠(𝜃)(𝑒1·𝑒1) + 𝑠𝑖𝑛(𝜃)(𝑒1·𝑒2)
- = 𝑐𝑜𝑠(𝜃)
- 𝑒̃2·𝑒̃2 = (𝑐𝑜𝑠(𝜃)·𝑒1 + 𝑠𝑖𝑛(𝜃)·𝑒2) · (𝑐𝑜𝑠(𝜃)·𝑒1 + 𝑠𝑖𝑛(𝜃)·𝑒2)
- = 𝑐𝑜𝑠(𝜃)2(𝑒1·𝑒1) + 𝑠𝑖𝑛(𝜃)2(𝑒2·𝑒2) + 2·𝑠𝑖𝑛(𝜃)·𝑐𝑜𝑠(𝜃)(𝑒1·𝑒2)
- = 𝑐𝑜𝑠(𝜃)2 + 𝑠𝑖𝑛(𝜃)2
- = 1
Thus:
- 𝑒1·𝑒1 = 1
- 𝑒1·𝑒2 = 0
- 𝑒2·𝑒2 = 1
- 𝑒̃1·𝑒̃1 = 1
- 𝑒̃1·𝑒̃2 = 𝑐𝑜𝑠(𝜃)
- 𝑒̃2·𝑒̃2 = 1
Say We Have Arbitrary Vectors
First, define 2 new basis vectors {𝑒̃1, 𝑒̃2}:
- 𝑒̃1·𝑒̃1 = 1
- 𝑒̃1·𝑒̃2 = 𝑐𝑜𝑠(𝜃)
- 𝑒̃2·𝑒̃2 = 1
The metric tensor (𝑣·𝑤) is computed as:
- (𝑣·𝑤) = (𝑎·𝑒̃1)·(𝑏·𝑒̃2)
- = 𝑎𝑏·(𝑒̃1·𝑒̃2)
- = 𝑎𝑏·𝑐𝑜𝑠(𝜃)
- = ||𝑣||·||𝑤||·𝑐𝑜𝑠(𝜃)
Thus:
The angle between 2 vectors can be computed entirely by the metric tensor
- (𝑣·𝑤) = (𝑣1·𝑒1 + 𝑣2·𝑒2) · (𝑤1·𝑒1 + 𝑤2·𝑒2)
- = (𝑣1·𝑒1 + 𝑣2·𝑒2) · (𝑤1·𝑒1 + 𝑤2·𝑒2)
- = 𝑣1𝑤1(𝑒1·𝑒1) + 𝑣1𝑤2(𝑒1·𝑒2) + 𝑣2𝑤1(𝑒2·𝑒1) + 𝑣2𝑤2(𝑒2·𝑒2)
- = 𝑣1𝑤1𝑔11 + 𝑣1𝑤2𝑔12 + 𝑣2𝑤1𝑔21 + 𝑣2𝑤2𝑔22
- = 𝑣𝑖𝑤𝑗𝑔𝑖𝑗
Lengths & Angles Summary
- 𝑣·𝑣 = ||𝑣||2 = 𝑣𝑖𝑣𝑗 𝑔𝑖𝑗
- 𝑤·𝑤 = ||𝑤||2 = 𝑤𝑖𝑤𝑗 𝑔𝑖𝑗
- 𝑣·𝑤 = ||𝑣|| ||𝑤|| 𝑐𝑜𝑠(𝜃) = 𝑣𝑖𝑤𝑗 𝑔𝑖𝑗
Components of a Metric Tensor
- 𝑔𝑖𝑗 = 𝑒𝑖·𝑒𝑗 = 𝑒𝑗·𝑒𝑖= 𝑔𝑗𝑖
Thus the metric tensor is a symmetric matrix
Metric Tensor Algebraic Properties
- 𝑔: 𝑉⨯𝑉 → ℝ
- multiplication
- 𝑎·(𝑣𝑖𝑤𝑗𝑔𝑖𝑗) = (𝑎·𝑣𝑖)𝑤𝑗𝑔𝑖𝑗 = 𝑣𝑖(𝑎·𝑤𝑗)𝑔𝑖𝑗
- 𝑎·𝑔(𝑣,𝑤) = 𝑔(𝑎·𝑣,𝑤) = 𝑔(𝑣,𝑎·𝑤) # simplified
- addition
- 𝑔(𝑣+𝑢,𝑤) = 𝑔(𝑣,𝑤) + 𝑔(𝑢,𝑤)
- 𝑔(𝑣,𝑤+𝑢) = 𝑔(𝑣,𝑤) + g(𝑣,𝑢)
- symmetric
- 𝑔(𝑣,𝑤) = 𝑔(𝑤,𝑣)
- positive definite
- 𝑔(𝑣,𝑣) = ||𝑣||2 ≥ 0
Metric Tensors are a type of bilinear form with 2 additional properties:
- symmetric
- positive definite
10 - How do Metric Tensor Components Change WRT Change of Basis
Click here to expand...
Link to originalHOW METRIC TENSOR COMPONENTS CHANGE WRT CHANGE OF BASIS
- 𝑔𝑘𝑙= 𝑒𝑘·𝑒𝑙
- 𝑔̃𝑖𝑗 = 𝑒̃𝑖·𝑒̃𝑗
- 𝑔̃𝑖𝑗 = 𝑒̃𝑖·𝑒̃𝑗
- 𝑔̃𝑖𝑗 = (𝐹𝑘𝑖 𝑒𝑘)·(𝐹𝑙𝑗 𝑒𝑙)
- 𝑔̃𝑖𝑗 = 𝐹𝑘𝑖𝐹𝑙𝑗 (𝑒𝑘·𝑒𝑙)
- 𝑔̃𝑖𝑗 = 𝐹𝑘𝑖𝐹𝑙𝑗 𝑔𝑘𝑙
- 𝑔𝑖𝑗 = 𝑒𝑖·𝑒𝑗
- 𝑔𝑖𝑗 = (𝐵𝑘𝑖 𝑒̃𝑘)·(𝐵𝑙𝑗 𝑒̃𝑙)
- 𝑔𝑖𝑗 = 𝐵𝑘𝑖𝐵𝑙𝑗 (𝑒̃𝑘·𝑒̃𝑙)
- 𝑔𝑖𝑗 = 𝐵𝑘𝑖𝐵𝑙𝑗 𝑔̃𝑘𝑙
CONFIRM THE SQUARED LENGTH OF A VECTOR REMAINS THE SAME WRT CHANGE OF BASIS
verify the following two statements are equivalent:
- ||𝑣||2 = 𝑣𝑖𝑣𝑗 𝑔𝑖𝑗
- ||𝑣||2 = 𝑣̃𝑖𝑣̃𝑗 𝑔̃𝑖𝑗
proof:
- ||𝑣||2 = 𝑣̃𝑖𝑣̃𝑗 𝑔̃𝑖𝑗
- ||𝑣||2 = (𝐵𝑖𝑎 𝑣𝑎) (𝐵𝑗𝑏 𝑣𝑏) (𝐹𝑘𝑖 𝐹𝑙𝑗 𝑔𝑘𝑙)
- ||𝑣||2 = 𝑣𝑎𝑣𝑏𝑔𝑘𝑙(𝐵𝑖𝑎𝐹𝑘𝑖 𝐵𝑗𝑏𝐹𝑙𝑗)
- ||𝑣||2 = 𝑣𝑎𝑣𝑏𝑔𝑘𝑙(𝛿𝑎𝑘 𝛿𝑏𝑙) # 𝐵𝐹 simplifies to Kronecker delta function
- ||𝑣||2 = 𝑣𝑘𝑣𝑙𝑔𝑘𝑙
- ||𝑣||2 = 𝑣𝑖𝑣𝑗𝑔𝑖𝑗
11 - How do Basis of a Metric Tensor Change WRT Change of Basis
Click here to expand...
Link to originalTODO
12 - Bilinear Forms Introduction
Click here to expand...
Link to originalMETRIC TENSOR ALGEBRAIC PROPERTIES
- 𝑔: 𝑉⨯𝑉 → ℝ
- 𝑎·𝑔(𝑣,𝑤) = 𝑔(𝑎·𝑣,𝑤) = 𝑔(𝑣,𝑎·𝑤) # simplified
- 𝑔(𝑣+𝑢,𝑤) = 𝑔(𝑣,𝑤) + 𝑔(𝑢,𝑤)
- 𝑔(𝑣,𝑤+𝑢) = 𝑔(𝑣,𝑤) + g(𝑣,𝑢)
- 𝑔(𝑣,𝑤) = 𝑔(𝑤,𝑣)
- 𝑔(𝑣,𝑣) = ||𝑣||2 ≥ 0
BILINEAR FORM DEFINITION
- 𝐵: 𝑉⨯𝑉 → ℝ
- 𝑎·𝐵(𝑣,𝑤) = 𝐵(𝑎·𝑣,𝑤) = 𝐵(𝑣,𝑎·𝑤)
- 𝐵(𝑣+𝑢,𝑤) = 𝐵(𝑣,𝑤) + 𝐵(𝑢,𝑤)
- 𝐵(𝑣,𝑤+𝑢) = 𝐵(𝑣,𝑤) + 𝐵(𝑣,𝑢)
thus bilinear forms are (0,2)-tensors:
FORMS are functions that take vectors as input and output a field
- the linear form takes in 1 vector
- the bilinear forms take in 2 vectors
BILINEAR FORMS
- are linear combinations of covector-covector pairs
How do Bilinear Form components Change WRT change of Basis?
see: Tensor - 13 - How do Bilinear Form Components Change WRT Change of Basis
Why a row of rows?
Bilinear Forms V⨯𝑉 → ℝ:
Basis of a Bilinear Form
{𝜀1𝜀1, 𝜀1𝜀2, 𝜀2𝜀1, 𝜀2𝜀2} is one possible basis for bilinear form 𝐵: ℝ2→ℝ where:
Thus
- 𝐵 = 𝐵11𝜀1𝜀1+ 𝐵12𝜀1𝜀2 + 𝐵21𝜀2𝜀1 + 𝐵22𝜀2𝜀2
- 𝐵 = 𝐵𝑖𝑗 𝜀𝑖𝜀𝑗 # Einstein’s notation
Thus: bilinear forms can be written as linear combinations of covector-covector pairs
How is a Basis 𝜀𝑖𝜀𝑗 a Bilinear Form (That Eats 2 Vectors and Outputs a Scalar)?
Given:
- 𝐵 = 𝐵𝑖𝑗 𝜀𝑖𝜀𝑗
- 𝑣 = 𝑣𝑘𝑒𝑘
- 𝑤 = 𝑤𝑙𝑒𝑙
Let 𝐵 eat a vectors 𝑣 and 𝑤:
- 𝐵(𝑣,𝑤) = 𝐵(𝑣,𝑤)
- 𝐵(𝑣,𝑤) = 𝐵𝑖𝑗 𝜀𝑖𝜀𝑗(𝑣𝑘𝑒𝑘𝑤𝑙𝑒𝑙)
- 𝐵(𝑣,𝑤) = 𝐵𝑖𝑗𝑣𝑘𝑤𝑙𝜀𝑖(𝑒𝑘) 𝜀𝑗(𝑒𝑙)
- 𝐵(𝑣,𝑤) = 𝐵𝑖𝑗𝑣𝑘𝑤𝑙𝛿𝑖𝑘𝛿𝑗𝑙
- 𝐵(𝑣,𝑤) = 𝐵𝑖𝑗𝑣𝑖𝑤𝑗# 𝐵𝑖𝑗𝑣𝑖𝑤𝑗is a scalar
Which is a scalar
13 - How do Bilinear Form Components Change WRT Change of Basis
Click here to expand...
Link to originalDetailed
Given
Then
Thus
Thus
The bilinear map consumes 2 vectors and outputs a scalar
Given
Then
Simple (using covector-covector pairs)
Given
Bilinear Map Definition
Basis Covectors
Then
Then start with the definition of bilinear form 𝐵:
Next, transform all the basis vectors and basis covectors individually
Thus:
Then start with the definition of bilinear form 𝐵:
Next, transform all the basis vectors and basis covectors individually
Thus



Tensors - Types
(m,n)-tensor
- m = number of contravariant indices (top of 𝑇)
- n = number of covariant indices (bottom of 𝑇)
For example, a (3,3)-tensor 𝑇 is denoted as:
How do components of a (3,3)-tensor 𝑇 change WRT change of basis?
-
how it's computed
Prerequisite knowledge:
How Basis Vectors 𝑒𝑗 Change WRT Change of Basis
How Dual Basis Covectors 𝜀𝑖 Change WRT Change of Basis
Start with the definition:
Next, transform all the basis vectors and basis covectors individually and resolve:
Thus
-
how it's computed
Prerequisite knowledge:
How Basis Vectors 𝑒𝑗 Change WRT Change of Basis
How Dual Basis Covectors 𝜀𝑖 Change WRT Change of Basis
Start with the definition:
Next, transform all the basis vectors and basis covectors individually and resolve:
Thus
|
Name |
Tensor Type |
Longer |
Shorter |
How Components Change |
Is an Element of |
Available |
Additional | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
covariant |
|
|
|
|
N/A |
| |||||||||||||||||||||||||
|
contravariant |
|
|
|
|
|
| |||||||||||||||||||||||||
|
contravariant |
|
|
|
|
N/A |
| |||||||||||||||||||||||||
|
covariant |
|
|
|
|
|
| |||||||||||||||||||||||||
|
(1,1)-tensor |
|
|
|
|
|
| |||||||||||||||||||||||||
|
(0,2)-tensor |
|
|
|
|
| ||||||||||||||||||||||||||
|
(0,2)-tensor |
|
|
|
|
|
| |||||||||||||||||||||||||
Resources
- NASA’s - An Introduction to Tensors for Students of Physics and Engineering
-
Brian Keng's Tensor Introduction
Original Article
Article Copy
List indent undo

List indent undo
- YouTube - FloatHeadPhysics - Intuitive Tensors
- YouTube - Mu Prime Math - A Concrete Introduction to Tensor Products
- YouTube - EigenChris - Tensors for Beginners
- YouTube - EigenChris - Tensor Calculus
-
Old Stuff
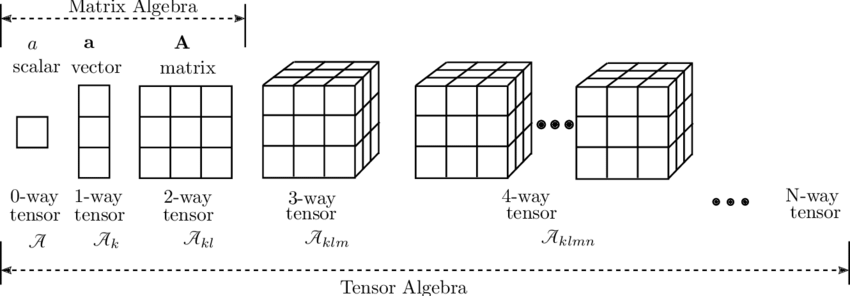
Tensor Ranks
Tensor Rank
Name
Description
# of components
tensor of rank 0
magnitude (no direction)
- 1
tensor of rank 1
each component describes the magnitude in a particular direction
- magnitude in the x-direction
- magnitude in the y-direction
- magnitude in the z-direction
- 3 - for 3 dimensions
tensor of rank 2
dyad
each direction is described with a vector
- x direction is described with a vector
- y direction is described with a vector
- z direction is described with a vector
- 9 - for 3 components for each of the 3 dimensions
tensor of rank 3
triad
- 27
Einstein’s Theory of Relativity required a tensor of rank 4 (x,y,z,t); thus 4*4*4*4=256 components to describe the Theory of Relativity
Tensor - Represented as a Matrix
List indent undo